第九届“挑战杯”首都大学生课外学术竞赛 三等奖
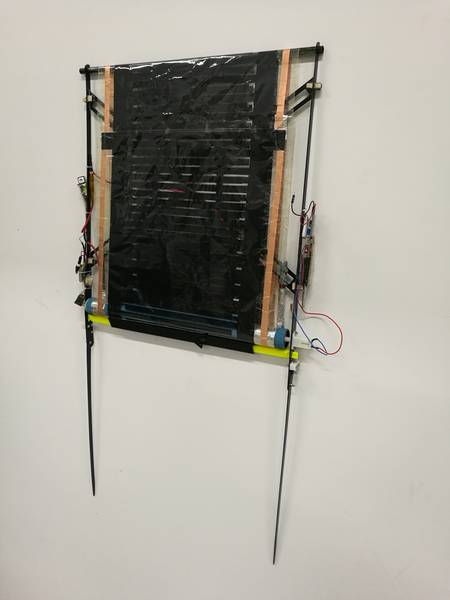
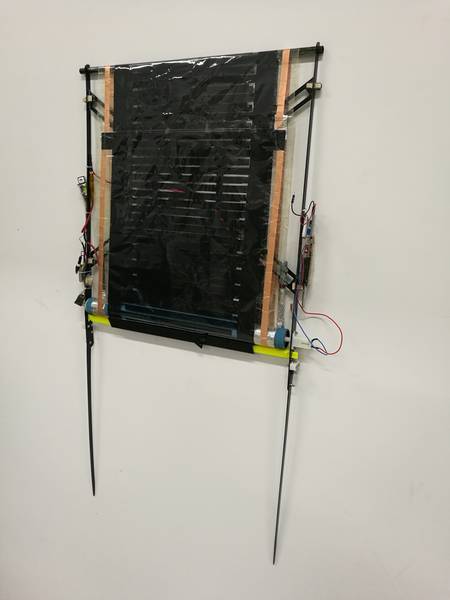
针对目前垂直表面移动机器人的研究现状及不足,本文提出了一种新型的基于静电吸附的垂直移动任务平台,利用电场作用实现吸附,通过柔性电极适应不同表面粗糙度。文章创新性地提出了电容电压分析法对吸附原理进行详细阐述,以此指导吸附电极优化设计。原理样机的性能测试证明了该静电吸附方式的高可行性、优越性以及广阔的应用前景。