用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
仿飞鼠跳跃滑翔机器人
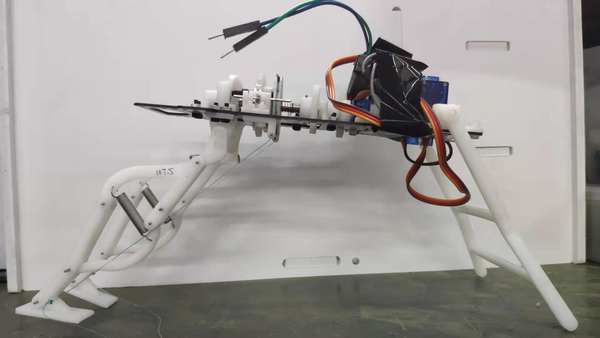
仿飞鼠跳跃滑翔机器人
航空科学与工程学院
作品介绍
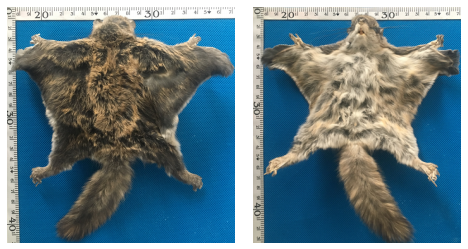
当前野外侦察机器人主要以多足机器人及履带式机器人为主,虽然具有很强的机动性,但同时存在续航时间短及无法适应有高度落差环境的问题,无法在真实、复杂的野外环境中进行侦察工作。 大自然中有一种被称为飞鼠的动物,中国古代文学家荀子在《荀子•劝学》提到鼯鼠五技,即能滑、能爬、能跑、能游、能掘。 因此我们决定制作一款仿飞鼠跳跃滑翔机器人,通过分析模仿飞鼠的运动模式,使机器人可以适应不同地形的复杂野外环境。
作品图片
作品视频