用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
一种轮径可变的异形轮移动机器人
一种轮径可变的异形轮移动机器人
机械工程及自动化学院
作品介绍
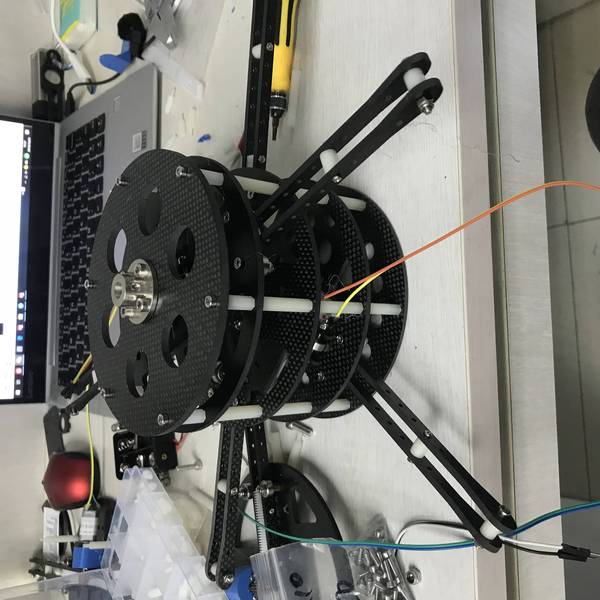
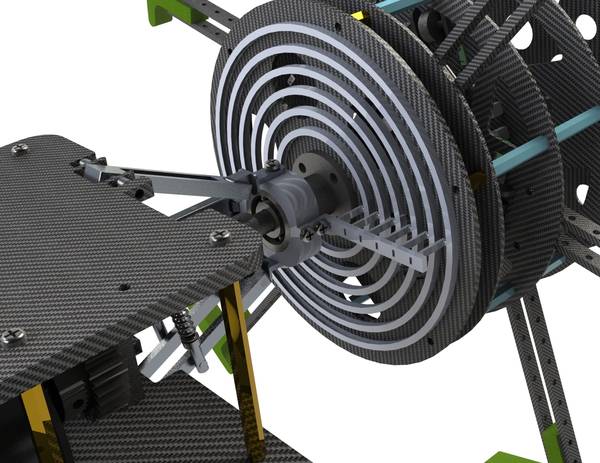
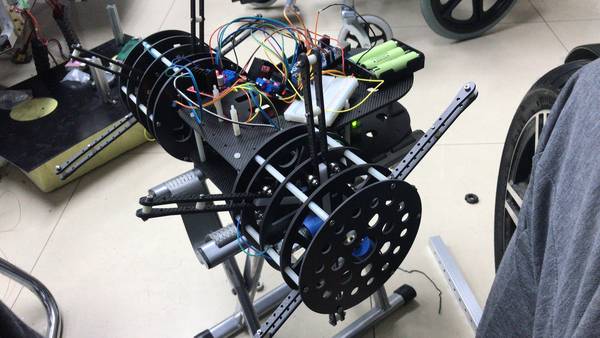
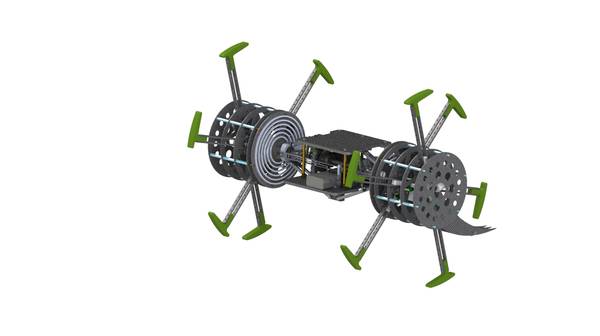
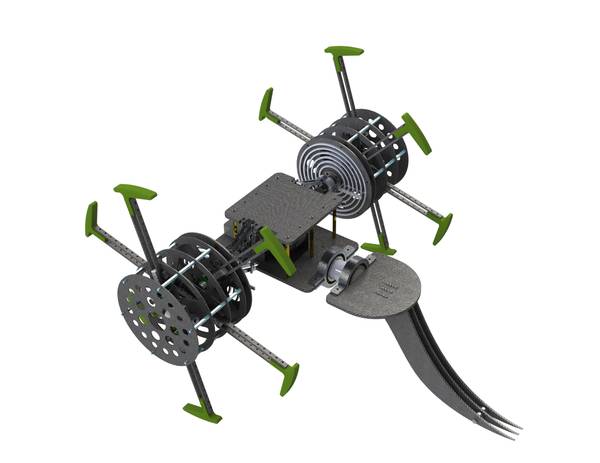
本项目初步完成了一种轮径可变的异形轮移动机器人的研制,同时具有较高的越障能力和平稳性的特点,主要研究内容包括机机器人的机构设计、控制系统和仿真分析。经过三次迭代,机器人的机械结构得以完善,主要包括:基于齿轮齿条传动的三层腿部的异形轮机构及足部仿形,转向系统,独立悬挂和导电滑环。机器人采用遥控方式,实现对主轴转动、腿部长度变化和转向控制共8自由度的驱动。最后进行了动力学仿真,验证了其越障能力。
作品图片
作品视频