用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
基于步速自适应的康复用外骨骼控制
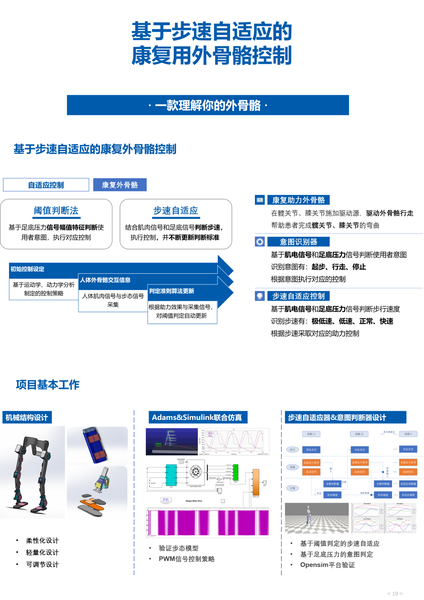
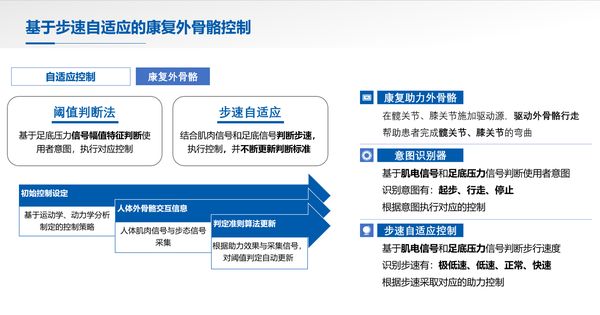
基于步速自适应的康复用外骨骼控制
仪器科学与光电工程学院
作品介绍
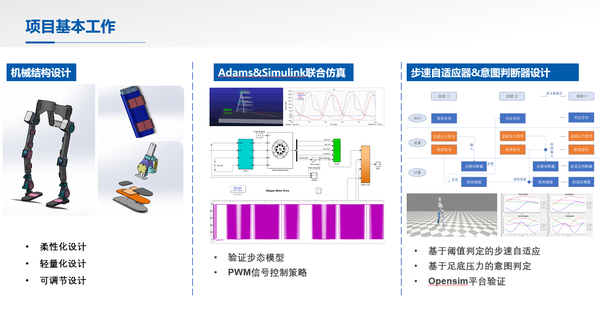
本项目旨在改进当前康复用外骨骼的检测手段,在肌电信号的基础上,拓展外骨骼控制输入维度,纳入更易测可靠的步态分析的方法,通过试验采集数据,发掘步态参数、肌电信号与地形之间的联系,以设计出更可靠精准的康复用外骨骼,并以此为基础,建立对类人机器人进行电信号-步态映射关系,进一步应用于类人机器人的步态控制方法。
作品图片
作品视频