用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
六足机器人滚动运动的研究
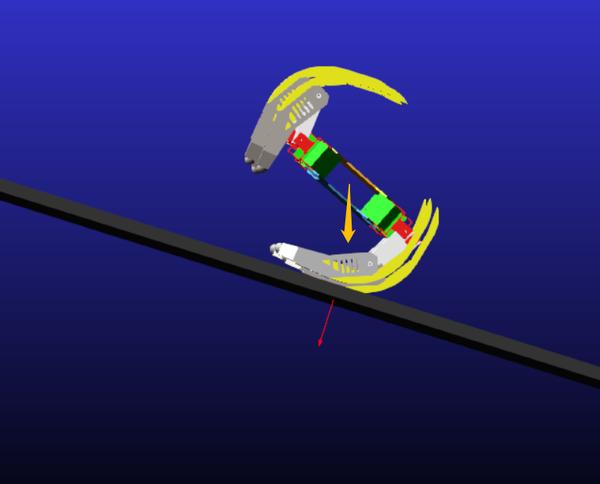
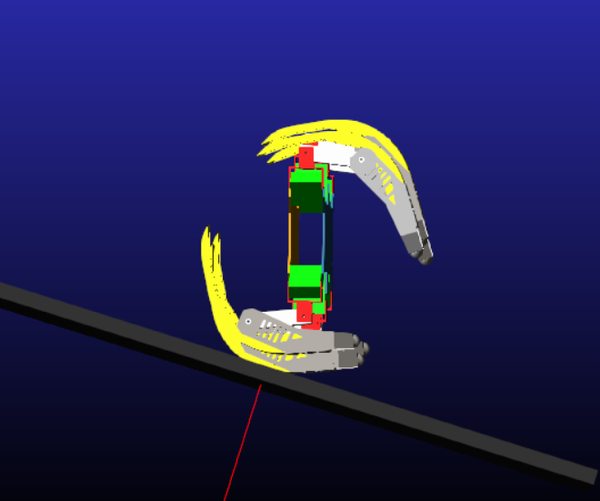
六足机器人滚动运动的研究
能源与动力工程学院
作品介绍
多足机器人在运动时,其多自由度、多驱动关节问题是机器人研究过程中的难点,尤其是在崎岖地形运动时,需要实时调整其运动以保证稳定性。本项目受沙漠中风滚草植物运动特点的启发,将足式机器人的腿式运动转变成滚动运动,简化了运动过程中复杂的实时调整问题。
作品图片
作品视频