用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
智能图书搬运整理机器人
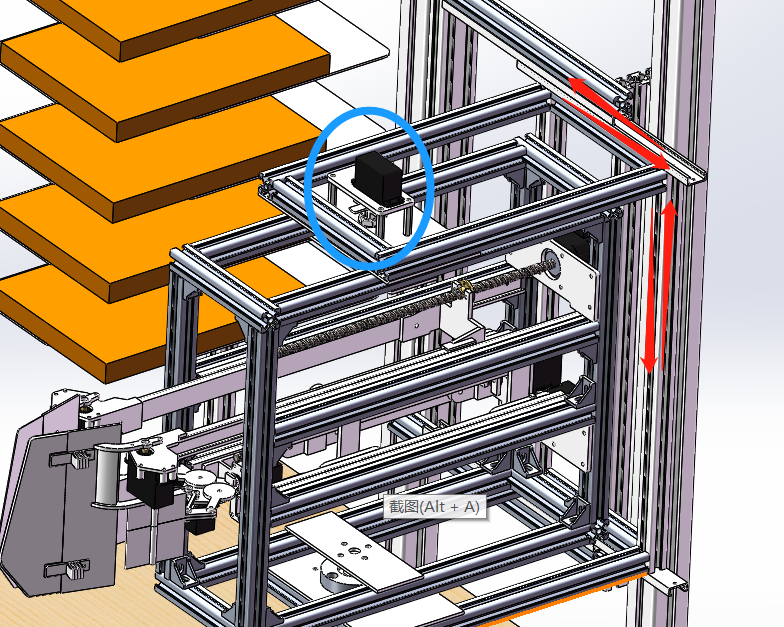
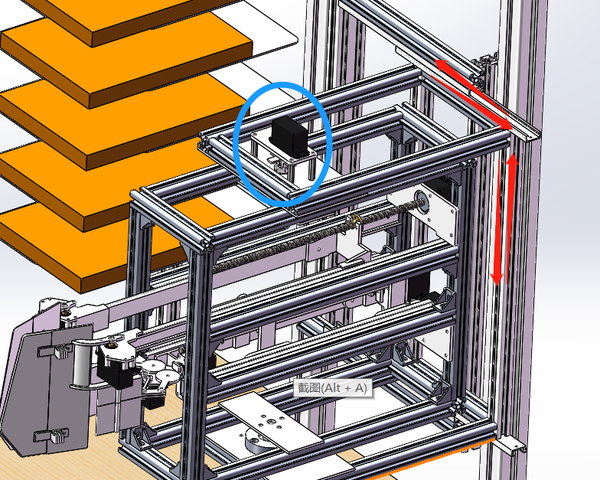
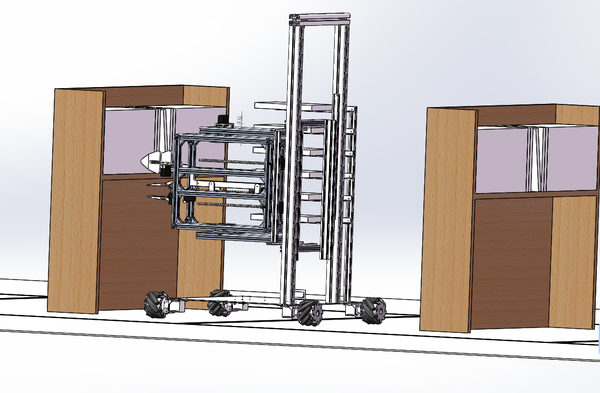
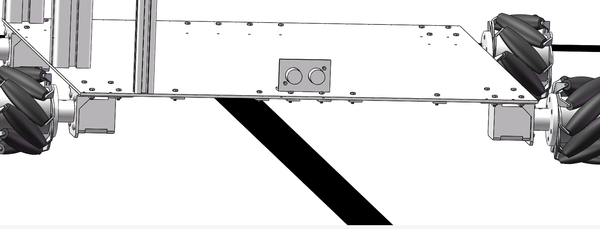
智能图书搬运整理机器人
能源与动力工程学院
作品介绍
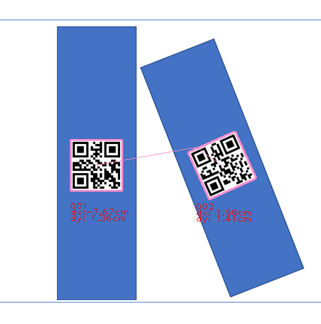
机器人运送目标主要针对于图书馆借阅室的书籍。机器人在指定地点装载已被借阅的书籍,通过贴在书籍上的二维码获取位置信息,可进行路径规划,自主定位、自主移动与自主避障,将书运送至原位,通过图像采集器获取环境信息,识别分析后将书籍被取出后的空位相对机器人的坐标发动给机械装置,机械爪抓取书籍放入原位,并要保证不扰乱周围其它书籍。
作品图片
作品视频