用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
基于深度学习的视觉SLAM三维重建系统
基于深度学习的视觉SLAM三维重建系统
仪器科学与光电工程学院
作品介绍
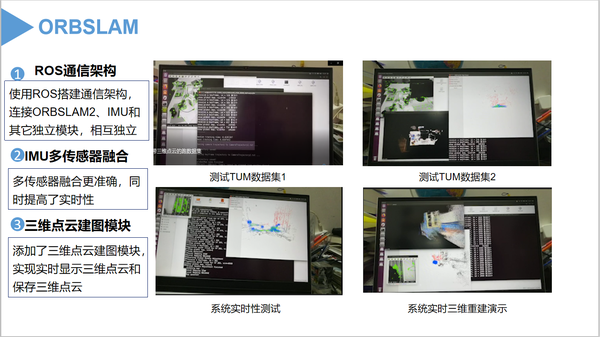
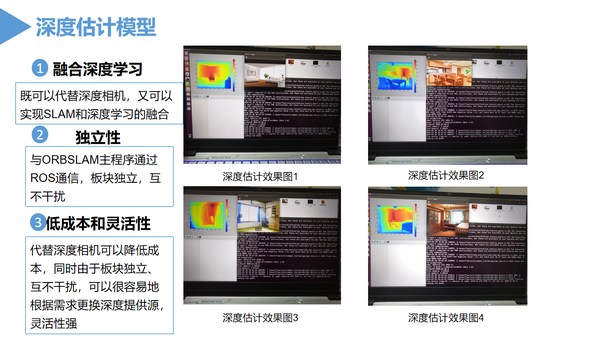
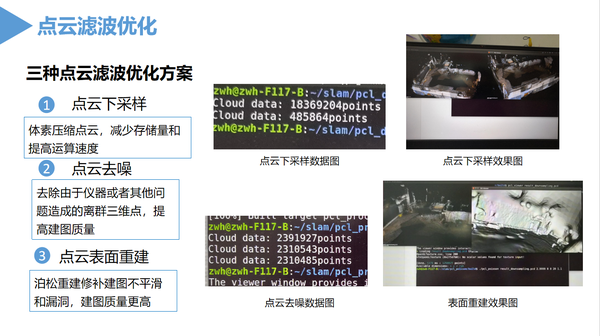
当前,许多应用对三维重建有迫切需求,传统三维重建面临挑战,视觉SLAM和深度学习不断发展。本项目融合视觉SLAM和惯导,并基于深度学习构建前端后端网络。前端用深度估计模型代替深度相机,估计深度;后端用三维点云分割模型实现语义分割,还加入了点云滤波优化技术,实现下采样、去噪、表面重建;能重建基于语义标签的稠密三维点云地图。本文创新性地实现视觉SLAM+惯导+深度学习,并进行了系统实验,验证了可行性。
作品图片
作品视频