用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
结构化场景下快速移动机器人的高精度定位系统
结构化场景下快速移动机器人的高精度定位系统
机械工程及自动化学院
作品介绍
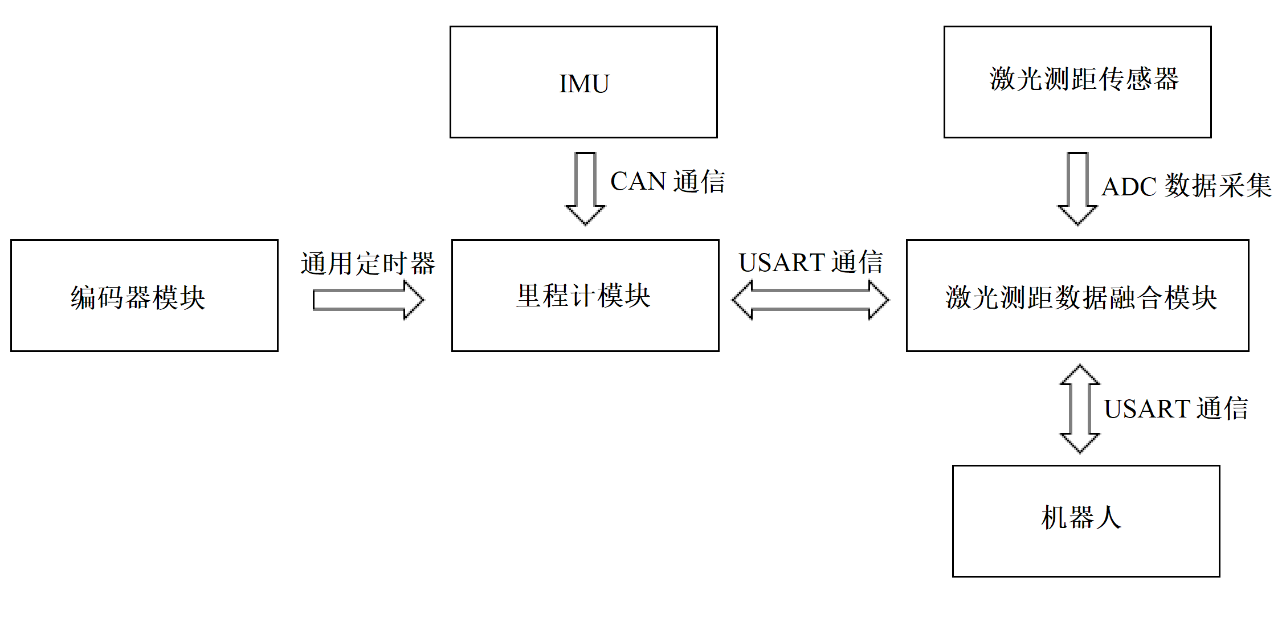
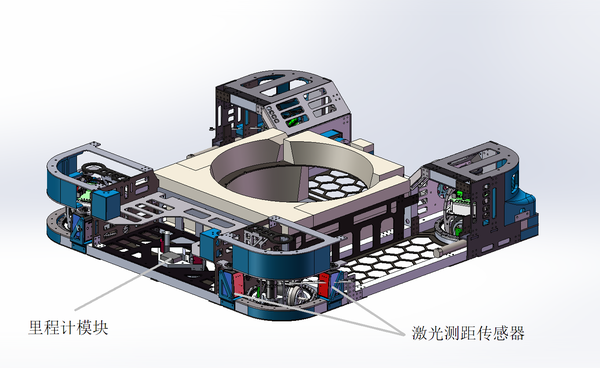
本文介绍了一种用于结构化环境下快速移动机器人的高精度定位系统。该系统使用编码器、惯性测量单元和激光测距传感器等传感器,采用激光测距数据对里程计的定位数据进行修正的方法,能够在机器人快速移动的过程中实时地提供无累积误差的高精度定位信息,而无需在环境中布置标记物或定位基站。解决了传统里程计具有与累积误差的问题,弥补了基于视觉、激光雷达等定位方式在机器人快速移动时定位效果不佳的不足。
作品图片
作品视频