用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
基于三轮全向运动平台的可重构多机器人系统
基于三轮全向运动平台的可重构多机器人系统
自动化科学与电气工程学院
作品介绍
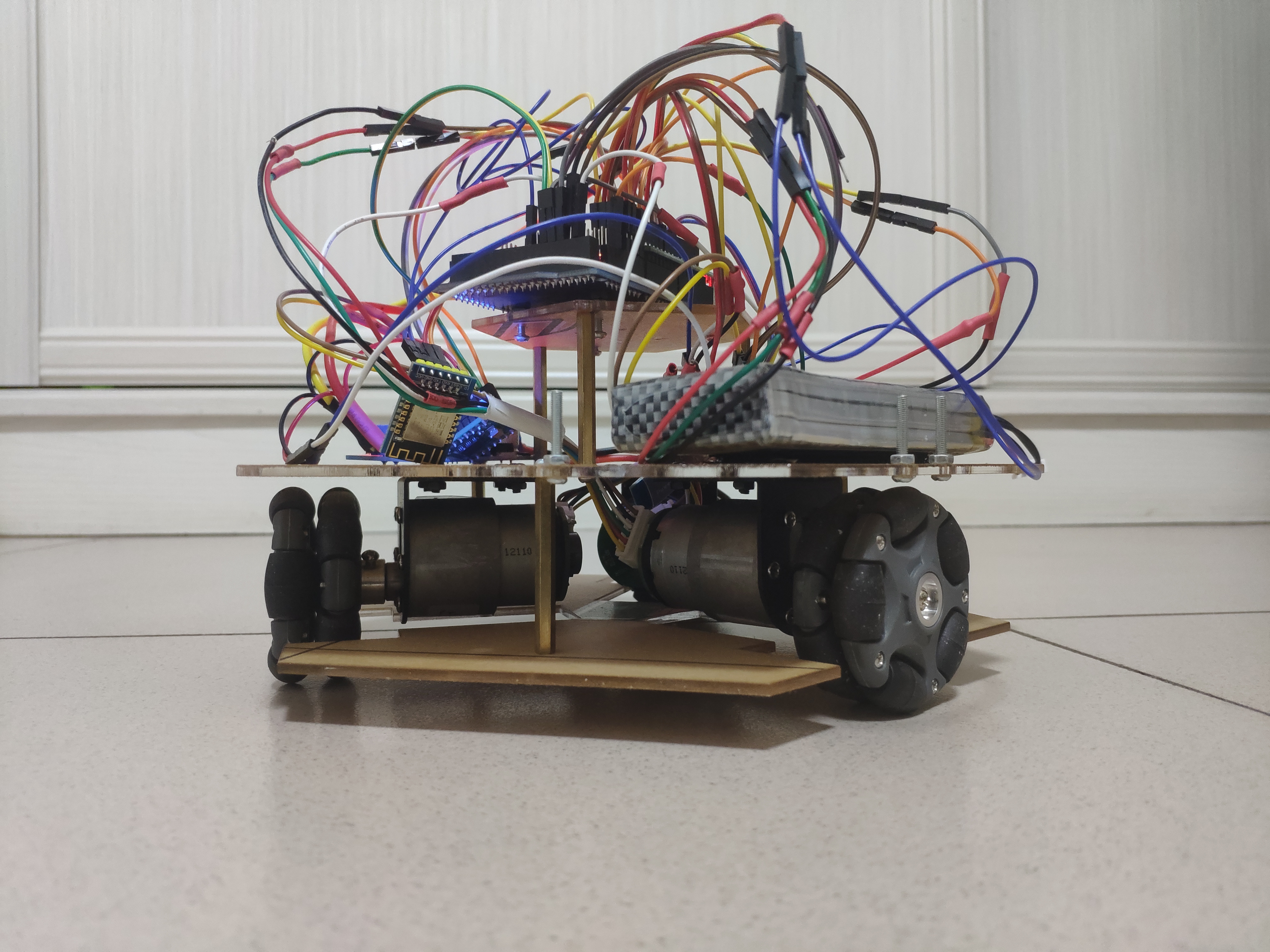
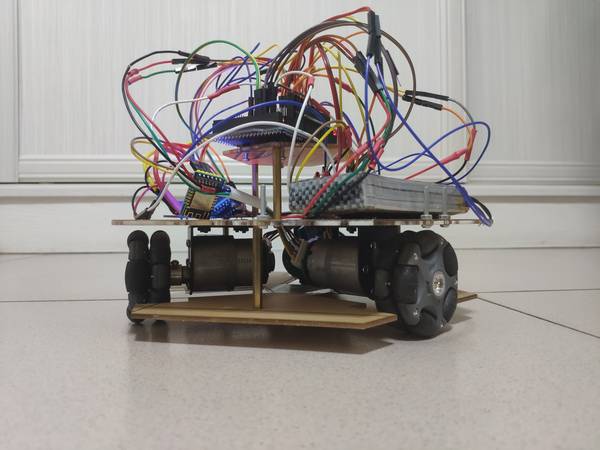
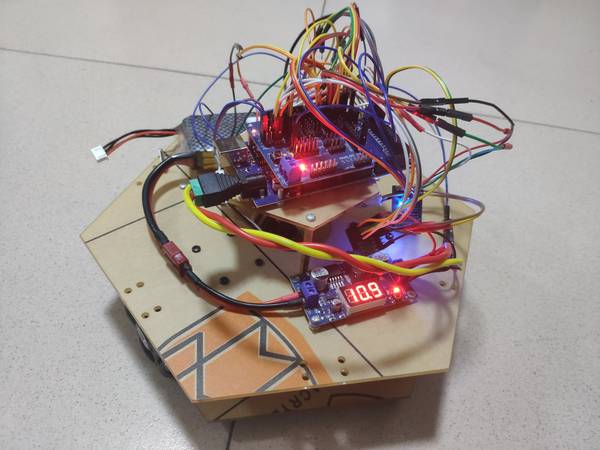
本文设计了一种可自重构多机器人系统。该机器人单元模块构型对称并能进行自主移动,多个机器人同时工作时能在协同算法下完成任务。 首先,设计了以arduino为平台设计的智能小车单元模块。小车整体呈正六边形,具有六个与其他模块对接的连接面。并具有三个全向轮,可以全向运动。 其次,设计了以电磁铁为依托的连接机构。 提出“领航者”方案。在该方案下设计了定位编队算法,开发智能小车阵列控制软件。
作品图片
作品视频