用户名:
密码
注册
登录
首页
结构设计
信息互联
理论探究
人文求索
过往经典
社会声誉
首页
>
结构设计
>
仿蜥蜴尾部设计的机动小车
仿蜥蜴尾部设计的机动小车
自动化科学与电气工程学院
作品介绍
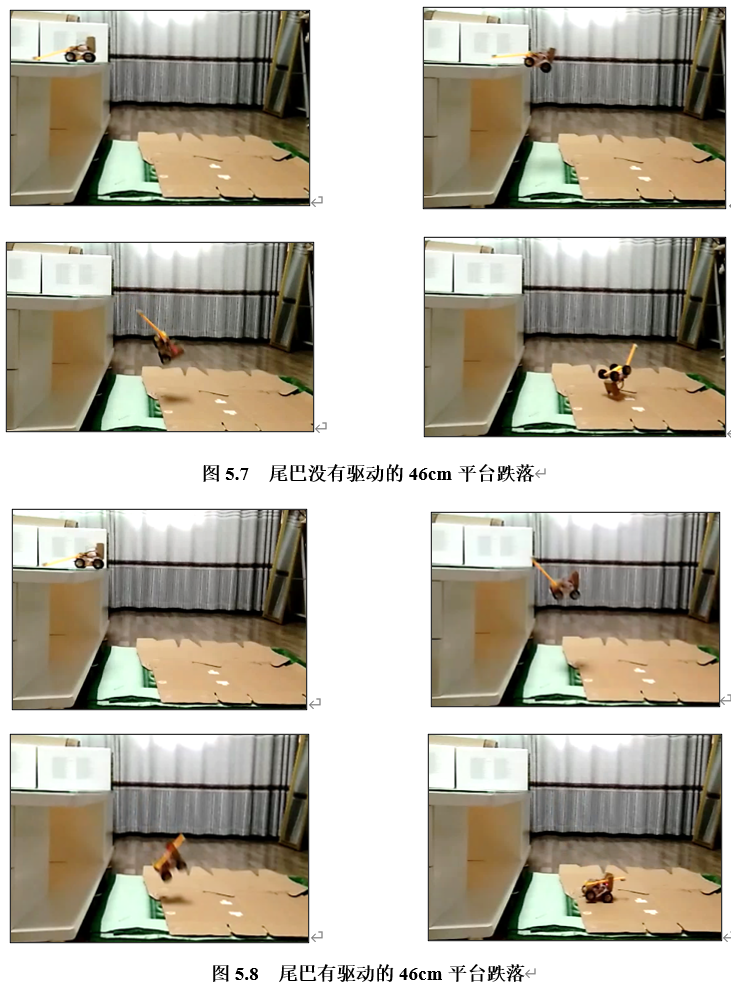
蜥蜴在跳跃失去平衡时,会通过尾巴向身体前方摆动来调节身体姿态。受此启发,我们制作了一款直流电机驱动的单自由度尾巴智能小车,可以在跌落过程中通过尾部转动调节俯仰,从而避免落地时翻车。我们用拉格朗日方法建立了二刚体动力学模型,并设计了比例微分控制器。最后制作了实物。此智能小车能够在150毫秒内进行90°的机身调节,从高度8倍于自身的平台跌落后,仍能保持水平落地。即使翻车,它也能通过尾巴翻正车身。
作品图片
作品视频